The MonkeySage Social Robot is designed to provide a safe and predictable social partner that will both facilitate the development of self-identity and act as a motivator to promote habitual mindfulness patterns.
Parasocial Relationship is the concept central to humanizing other beings, whether it be a pet animal, a empathic robot or a pet rock. Parasocial relationships are defined as one-way relationships that people make with others. They are usually defined as illusory in that the other does not interact as a person would–in fact they don’t even have to be real. None the less people build up an emotional-social one-way relationship and feel as if it is reciprocated. Two common examples would be comfort animals or a favorite pet doll. In both cases the other is turned into a surrogate human (anthropomorphized) by the user.
A SHORT HISTORY OF THE PARASOCIAL AND EMPATHIC ROBOTS
In the day of television, parasocial relationships were studied largely as linked to celebrities (such as Oprah or Beyonce). The rise of social media has amplified this relationship since social media feedback adds the illusion of social interaction (as with the popularity of YouTube influencers).
Parallel with the rise of media parasocial relationships was the development of empathic robots explicitly targeted to specific adult audiences (in contrast to dolls or stuffed animals).
EMPATHIC ROBOTS fall into three categories:
Humanoid ‘replicants’;
Emotive comfort robots, including humanoid robots; ‘classic’ robots; zoomorphic empathic robots and zoomorphic pet surrogates;
Software-based APPs.
HUMANOID REPLICANTS include: Ishiguro Hiroshi’s IRL Osaka University robot (Erica (2015) https://eng.irl.sys.es.osaka-u.ac.jp/

Hanson Robotics Sophia (2017) https://www.hansonrobotics.com/

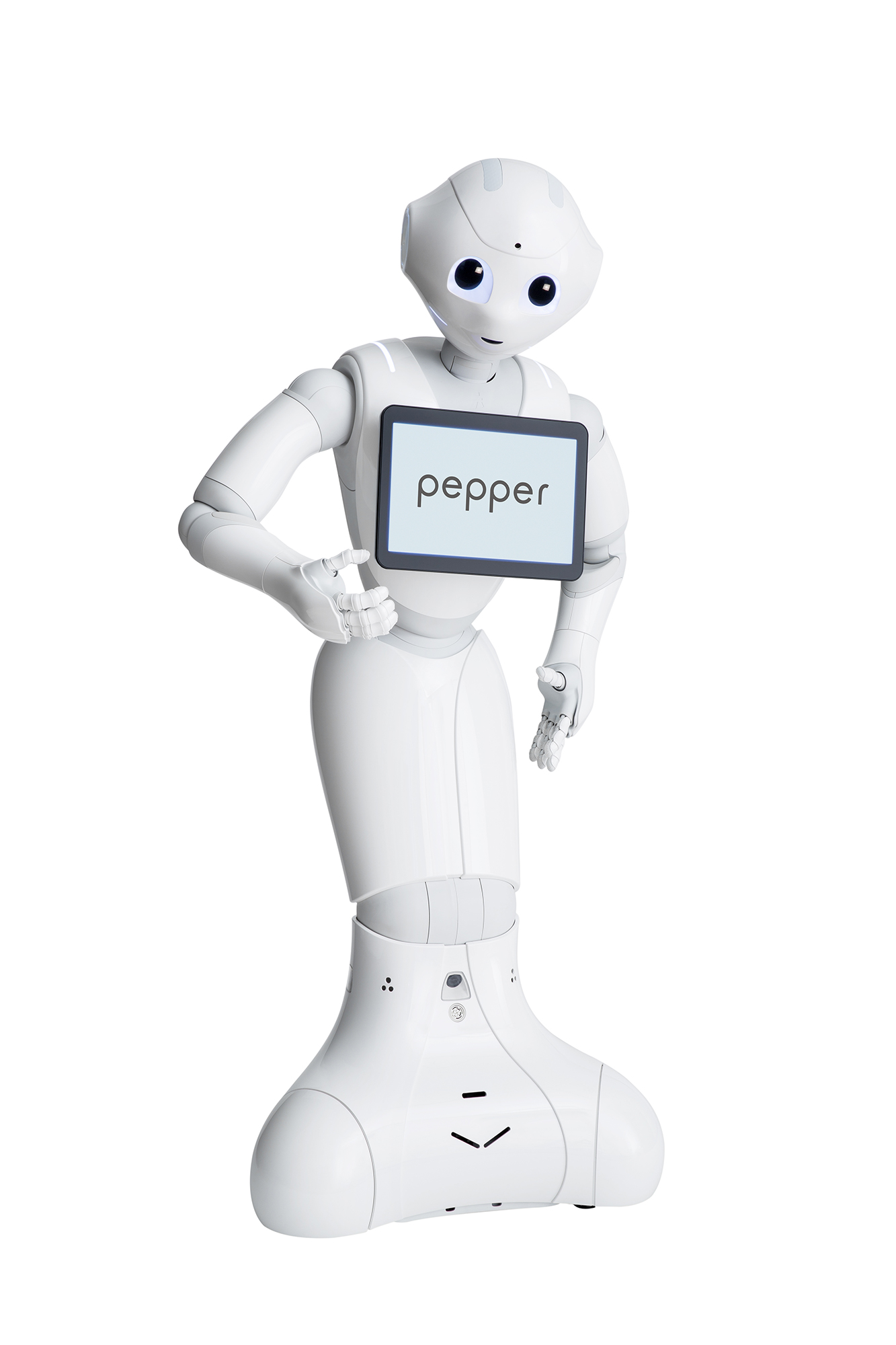
and SoftBank’s Pepper (2014, with over 7000 in use) https://www.softbankrobotics.com/us/pepper
EMOTIVE COMFORT ROBOTS: HUMANOID FORM: Includes AskAmy Interactive Doll (2015) https://www.askamydoll.com/

Takara Tomy’s Yumel/Nerul Sleep Assistance Doll (2006)

and Bandai’s Primopuel interactive doll (1999)

EMOTIVE COMFORT ROBOTS: Classic Robots: Include TakaraTomy’s Robi and Nakayoshi (2015-2018)

and Toyota’s Kirobo Mini Robot (2016) https://www.toyota-europe.com/world-of-toyota/articles-news-events/introducing-kirobo-mini

EMOTIVE COMFORT ROBOTS: Zoomorphic Robots: This is by far the largest category both in variety and number produced, including the Joy For All Companion Cat/Dog companion pet (originally Hasbro, 2017+) https://joyforall.com/?rfsn=2607193.f7224b&utm_source=refersion&utm_medium=influencers&utm_campaign=2607193.f7224b

Paro Robots Seal Therapeutic Robot (2003+) http://www.parorobots.com/

Takara Tomy’s Hug-and-Dream Micky Mouse sleeping therapy robot (2016)

the Groove-X Lovot ( late 2019 projected) https://groove-x.com/
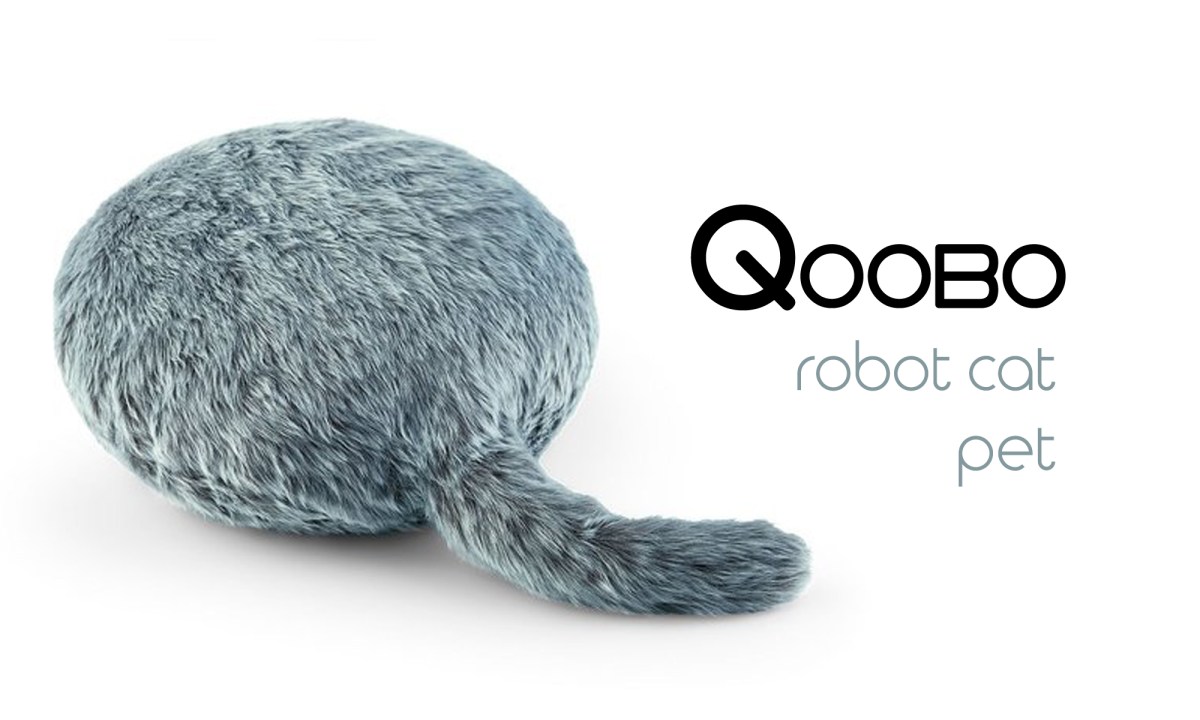
and the Yukai Engineering Qoobo Emotional Tail Pillow (2018+) https://qoobo.info/index-en/
Pet Surrogates is a related group of very popular (and diverse) social robots, though not intended as direct therapy-support devices. This would include the Hasbro Furby Friend (2000+) and Furreal (2002+) lines https://furby.hasbro.com/en-us; https://furreal.hasbro.com/en-us

Moose Toys Little Live Pets (2015+) https://www.moosetoys.com/brand/little-live-pets/

and Sega Toys Yume Neko Dream Cat Robotic Pet (2009/2015) as typical examples.

WHAT DO THEY ALL HAVE IN COMMON?
None of the varied forms of emotive robots are accurate animal mimics. While they vary in form and complexity they all have physical form and look, sound and behave enough like an animal that clients make the intuitive emotional link and anthropomorphize them. We turn the robot into an animal because we want to imagine it to be an animal. They react in programmed ways to touch, sound and movement, but the companionship is actually provided by the client.
SOFTWARE-BASED EMPATHIC APPS
This is the new category, that of virtual companion. The only unit in production is Gatebox’s Azuma Hikari/Hatsune Miku holographic emotional companion (2018+) https://gatebox.ai/home/

PRODUCT PATHS:
Overall if you look at all the various robots shown above, there are two very different current approaches to designing Empathic Social Robots:
Engineering-Technology driven products are sophisticated and interactive but frequently without clearly specified goals. They often have the ability to modify behavior or actions (usually through AI) to handle variable client needs. They are often as much technological tour-de-force exhibits as functional social devices.
Emotive Comfort products are usually relatively robust and low-tech, but not very interactive. They require more parasocial input from the user and have little flexibility in handling changing client wants or needs. Only the the Paro Seal (2005) and Tomy’s Yumel Doll (2005) were designed with input from behavioral science specialists with clear behavioral goals.
